Hazard perception assessment & training for young, novice drivers
The UK Government have long been aware of the over-representation of novice drivers in the annual crash statistics; a pattern that is repeated in many countries across the world. While several risk factors associated with immaturity doubtless play a part, such as sensation seeking, impulsivity, distraction, and impairment though alcohol and drugs, there is also an acceptance that skill deficits contribute to their higher crash liability. One of these skills is hazard perception: the ability to detect dangerous situations on the road in sufficient time to respond appropriately to avoid a collision. Research from around the world has confirmed that new drivers are particularly poor at spotting hazards, and some prospective studies have even linked poor scores on hazard perception tests to a greater likelihood of having a collision in the future.
What is Hazard Perception Skill?
It has been argued that hazard perception is too narrow a term to describe the full range of behaviours that drivers engage in to avoid hazards, as decision making (“Is it a hazard?”), and behavioural responses to avoid the hazard (e.g., swerving, braking) do not readily fall under the label of perception (Pradhan and Crundall, 2017). If we consider the whole chain of behaviours that instead make up hazard avoidance, we get a feeling for the complexity of the process. Pradhan and Crundall (2017) provided a framework of hazard avoidance that details the processes that contribute to avoiding a crash (Figure 1).
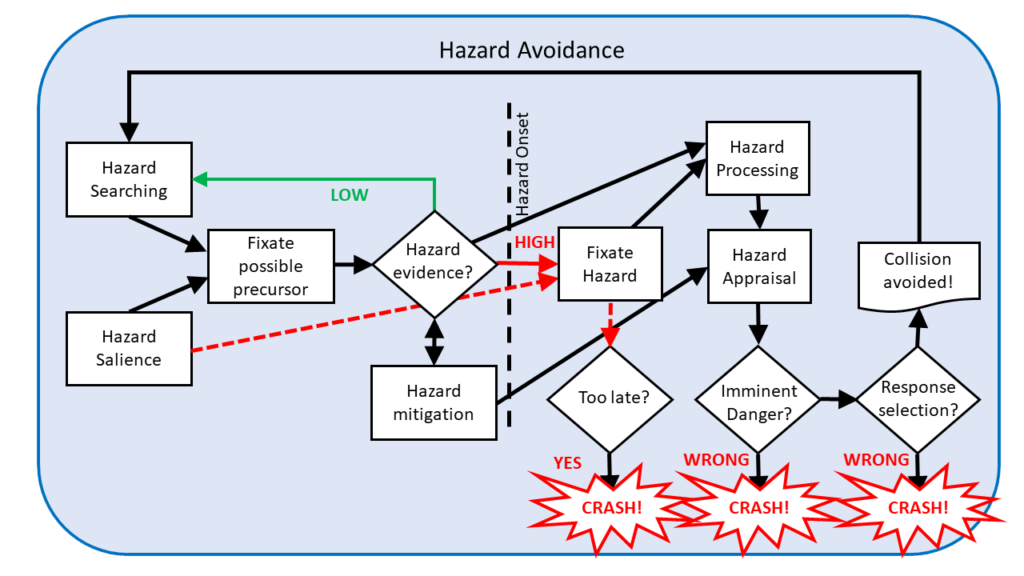
This framework of hazard avoidance suggests that drivers actively look for hazards (hazard searching). As we gain experience of driving, we learn where to look for potential hazards. Hazard searching however can be subverted by distracting activities (e.g., mobile phones, in-car conversations). Some on-road dangers will also have high hazard salience. This is the ability to attract attention to themselves due to bottom-up factors such as luminance or sudden movement.
If hazard searching or salience allows you to spot a hazard before it happens, then you are likely looking at a hazard precursor. Examples could include an oncoming vehicle that is positioning itself ready to turn across your lane into a side road, to a high-sided vehicle that might be hiding a pedestrian. This precursor is then assessed for its likelihood to become an actual hazard. If the hazard evidence is high enough to suggest this precursor may develop into a hazard, then you are likely to continue looking at the precursor until it becomes the hazard. You may even change your behaviour to mitigate the danger just on the strength of the evidence in the hazard precursor.
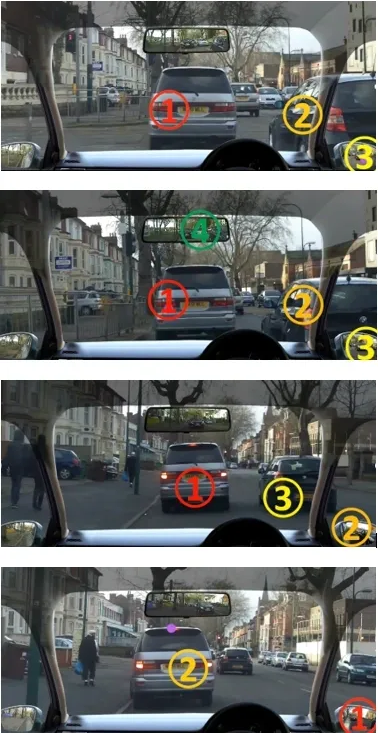
If the hazard evidence is low however, you place the precursor in the priority hierarchy and continue searching. The priority hierarchy is an implicit list of tagged areas of the scene that are ranked for their potential to produce a hazard. This ranked list is constantly in flux as new elements enter the list, old elements drop out, and current elements are re-ordered according to the dynamic situation (Figure 2).
When a hazard does appear (hazard onset), the driver will hopefully fixate it sooner than later. Hazard searching according to the priority hierarchy is more likely to lead to an early fixation of the hazard that relying on hazard salience. If one completely fails to fixate a precursor before a hazard appears, it is likely that the salience of the hazard itself attracts a late fixation (note the dashed arrow from hazard salience to fixate hazard). Following fixation of the hazard, processing and appraisal stages feed into the response selection. Errors at any of these stages may lead to a crash.
While this framework may provide a basis for understanding and exploring hazard avoidance as a complex skill, it does not lend itself to simple and consistent measurement in the driving populace. Instead, researchers focused on developing a test to measure the core element of hazard avoidance: detecting the hazards and realising that they are dangerous enough to require a response. This is the basis of the UK hazard perception test.
The UK Hazard Perception Test
To improve the hazard skills of new drivers, the UK introduced a hazard perception assessment into the driving test in 2002. This test requires learner drivers to visit a driver testing centre where they watch 14 clips of driving (each about a minute in duration), viewed from the driver’s perspective. Whenever they see a hazard, they must press a button as quickly as possible. They are told in advance that 13 clips will each contain 1 hazard, while one clip will contain two hazards. Their response times are then turned into a score, with a maximum of 5 points awarded per hazard, depending on when they pressed the button. Scores are derived from a scoring window that is set for each hazard. The window starts prior to the hazard, when some clues to the imminent danger are visible, and finishes at a point where any later responses would be insufficient to avoid the hazard. This scoring window is then split into five equally sized sub-windows. If drivers respond in the first of the five sub-windows, they receive 5 points. If they respond in the second sub-window they receive 4 points, and so on, until the scoring window has closed. Any responses before or after the scoring window do not receive any points.
Across 14 clips (containing 15 hazards) the maximum possible score is 75. Learner drivers must score 44 out of 75 to pass. Beyond the typical learner driver, many other groups of drivers are required to pass a hazard perception test for more advanced licenses. While the test remains the same, advanced drivers have a higher pass threshold. For instance, driving instructors must score 57 out of 75 to pass, while the threshold for HGV drivers is 67 out of 100 points (they view 19 clips).
The UK Government have introduced a range of measures to stop learner drivers from cheating the test. For example, the 14 clips that are presented to a driver are drawn randomly from a much larger pool of clips. This mitigates the potential for learner drivers to share their knowledge of the clips, as no two learners are likely to see the same 14 clips. There is also a limit to how many times a driver can click per clip (but the actual number is a closely guarded secret), after which drivers automatically score zero points. This is included to prevent drivers randomly clicking throughout a clip, in the hope of hitting the scoring window with one of their responses.
The first UK hazard test used video clips of driving, filmed from a moving vehicle. All hazards were staged and involved actors. In 2015, the test was updated, and the video clips were replaced with Computer Generated Imagery (CGI).
Has the UK test been successful?
The primary aim of the UK hazard perception test was to reduce collisions, especially those causing injury and death. A summative test can help achieve this in two ways – by encouraging drivers to train in the skill to pass the test, and by keeping the least safe drivers off the road. Despite hazard perception training being a key mechanism through which to reduce collisions, the UK Department for Transport has not provided any specific training packages, though they do licence a small number of official clips to training providers so their clients can practice for the test. Since 2002, many companies have developed and provided hazard perception training for learner drivers via online platforms, apps, and DVDs. While most of these companies provide access to the practice clips provided by the UK Government, many have also developed their own clips and training materials. It is however unclear how successful these commercial tests are at emulating the official test, as many details of the official test (e.g., how the scoring windows are decided) remain a secret, thus rendering it difficult to create one’s own substitute test. Despite these issues, approximately 75% of learners pass the hazard perception test, suggesting that many drivers have sought out successful training packages, and/or that driving instructors are now training hazard perception during lessons.
A study commissioned by the UK Department of Transport (Wells et al., 2006) concluded that the introduction of the hazard perception test into the UK licensing procedure significantly reduced non-low speed collisions where the driver accepted some of the blame (by 11.3%). More recent estimates suggest that the hazard perception test provides an annual reduction of over 8500 damage-only collisions and over 1000 injury collisions, with nearly £90 million saved (Horswill, 2016).
Despite the success of this award winning [1] test there are several overstanding concerns regarding its use. For instance, when driving instructors were first required to take the UK hazard perception test, pass rates were poor. It is claimed that many instructors were pressing too soon – they noticed the early cues to the impending hazard and tended to press before the scoring window opened. This emphasises the subjectiveness of the scoring window. We do not know how the UK Government decides to set the scoring windows, and many developing hazards do not lend themselves to an absolute threshold where clues to impending hazards suddenly transition into an actual hazard.
Neither do we know what the drivers are responding to when they press the button. It is assumed that a response in the scoring window reflects detection of the developing hazard, but it remains a possibility that some drivers might be pressing for some reason other than the true hazard. The nature of the hazards is also constrained by the typical boundaries of a computer monitor, with hazards only ever appearing within a forward arc of approximately 60-80 degrees. This removes the possibility of hazards appearing from nearby side streets, or any form of overtaking or undertaking hazard. Finally, there is also the question of how relevant a car-based hazard test, normed on learner drivers, is to an HGV driver or a motorcyclist.
Fortunately, advances in hazard perception research are providing solutions to some of these problems. The provision of mirror information provides additional information about vehicles coming from behind (see Figure 2), and the use of virtual reality headsets allow drivers to look for hazards beyond the forward arc. Within the research domain, tests are even being developed for different vehicles and job roles, such as the creation of hazard clips filmed from a fire appliance on a blue-light training run.
New scoring methods can also overcome the ambiguity of the response, with drivers required to click on the area of the screen where the hazard appears. Yet other variations of the traditional hazard perception test remove scoring windows altogether. Instead of pressing a button as quickly as possible when a hazard is spotted, the hazard prediction test stops clips just as the hazard begins, and the screen is occluded. The drivers are then asked, “What happens next?” and must choose one of four options on the screen.
The future of hazard perception testing
The last twenty years have demonstrated the success of the UK hazard perception test in reducing collisions. Several countries in Europe are now developing their own hazard tests, modifying the UK model with many of the new techniques that are currently being developed by researchers around the world. As the application of hazard perception testing advances and evolves, it has the potential to save lives across multiple countries.
Latest Blogs
If you want to improve the safety of your drivers, please get in touch for a no-obligation chat.


